
בניית בקר לרכבות זעירות בקנה מידה Z
— 16 במרץ, 2026
רכבות מדגם חשמלי מבריקות בפשטותן. לקטרים יש מנועים חשמליים קטנים והמסילות על המסילות פועלות כחוטים כדי להעביר חשמל למנועים אלה. אבל כמו תמיד עם מנועים חשמליים, ישנן רמות שונות של תחכום בכל הנוגע לבקרת מהירות. כדי לשדרג את סט הרכבות העתיק שלו בקנה מידה Z, Clem Mayer מ-element14 Presents בנה את הבקר האיכותי הזה.
דגמי רכבות מגיעות בכמה גדלים נפוצים, מסולם G הידידותי לחוץ הגדול (1:25) ועד סולם Z הזעיר (1:220) שיש למאייר – ויש גם גדלים אקזוטיים יותר. מדי פעם תראו קטרים גדולים המונעים בקיטור, אבל רוב דגמי הרכבות הם חשמליים. כמה בקרים מסורתיים (קרא: ישנים) השתמשו בכוח AC דרך שנאים. אבל רוב הדגמים המודרניים משתמשים בכוח DC. לחלקם יש אפילו שליטה דיגיטלית, כך ששני קטרים על אותו מסילה יכולים לפעול במהירויות שונות.
הבקר המקורי של מאייר היה מסוג DC פשוט, אך פלט המתח שלו לא היה עקבי. במהירויות נמוכות במיוחד, הוא התקשה לספק כוח נקי. למרבה המזל, הטכנולוגיה עברה דרך ארוכה. כעת קל ובמחיר סביר לספק כוח DC נקי למדי במתח משתנה.
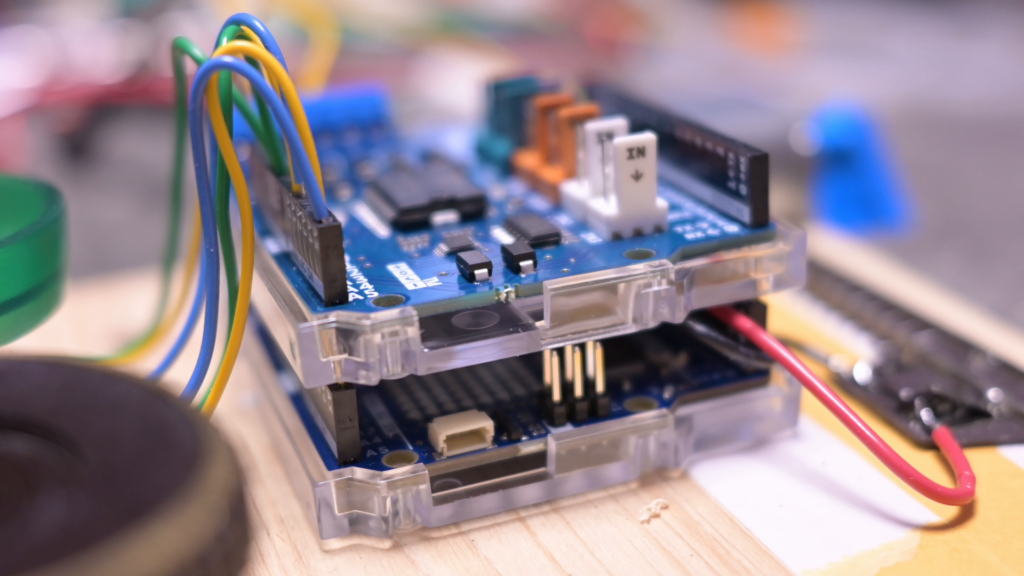
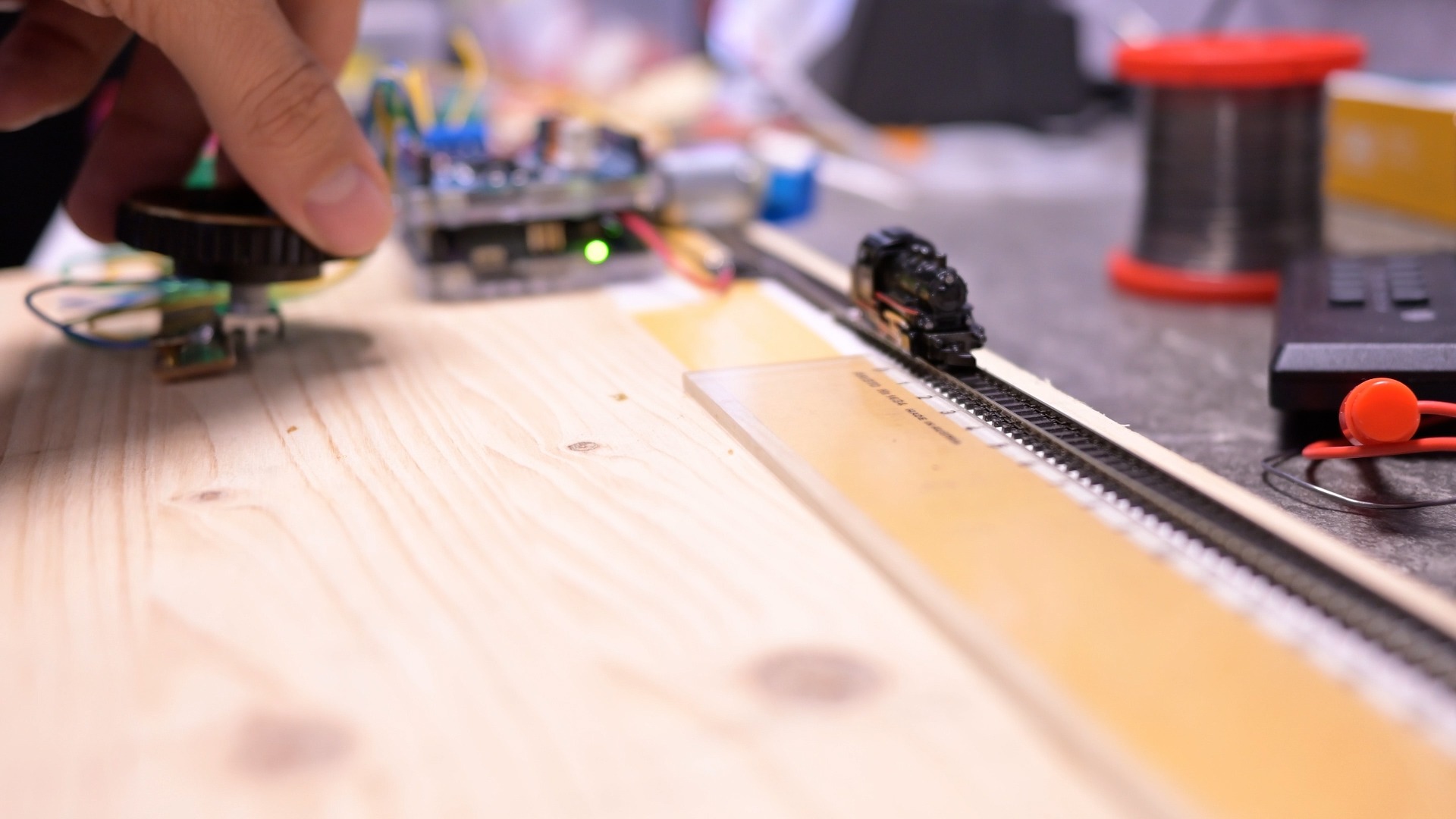
כדי להשיג זאת, מאייר השתמש ב- לוח WiFi של Arduino UNO R4. המשתמש מגדיר את מהירות הרכבת הרצויה עם מקודד סיבובי, כך שכל פירוט שרירותי אפשרי עם שינויים מהירים למשתנים בסקיצה. לאחר מכן הוא מפעיל את המסילות דרך א Arduino Motor Shield Rev3שיש לו את דרייבר ה-L298N H-bridge שנמצא בכל מקום. זה נועד במיוחד להנעת מנועים באמצעות מתח מוצא משתנה, אז זה הגיוני לחלוטין להשתמש כאן.
זה עבד טוב ממש "מהקופסה" עם סקיצה פשוטה מאוד, אבל מאייר גילה שזה עדיין הרגיש מתעוות בעת ביצוע התאמות מהירות. אז, הוא הוסיף אלגוריתם רמפינג שמאט את שינויי המתח לתחושה חלקה יותר.
התוצאה היא בקר איכותי שהופך את סט הרכבות העתיק בקנה מידה Z לנעים להפעלה.
קישור לכתבת המקור – 2026-03-16 19:56:00

