
חוקרים מאוניברסיטת פנסילבניה ואוניברסיטת מישיגן בנו את הרובוטים האוטונומיים הקטנים ביותר הניתנים לתכנות מלא שנוצרו אי פעם. מכונות מיקרוסקופיות אלו יכולות לשחות בנוזל, לחוש את הסביבה שלהן, להגיב בעצמן, לפעול במשך חודשים בכל פעם, ולעלות אגורה אחת לייצור כל אחת.
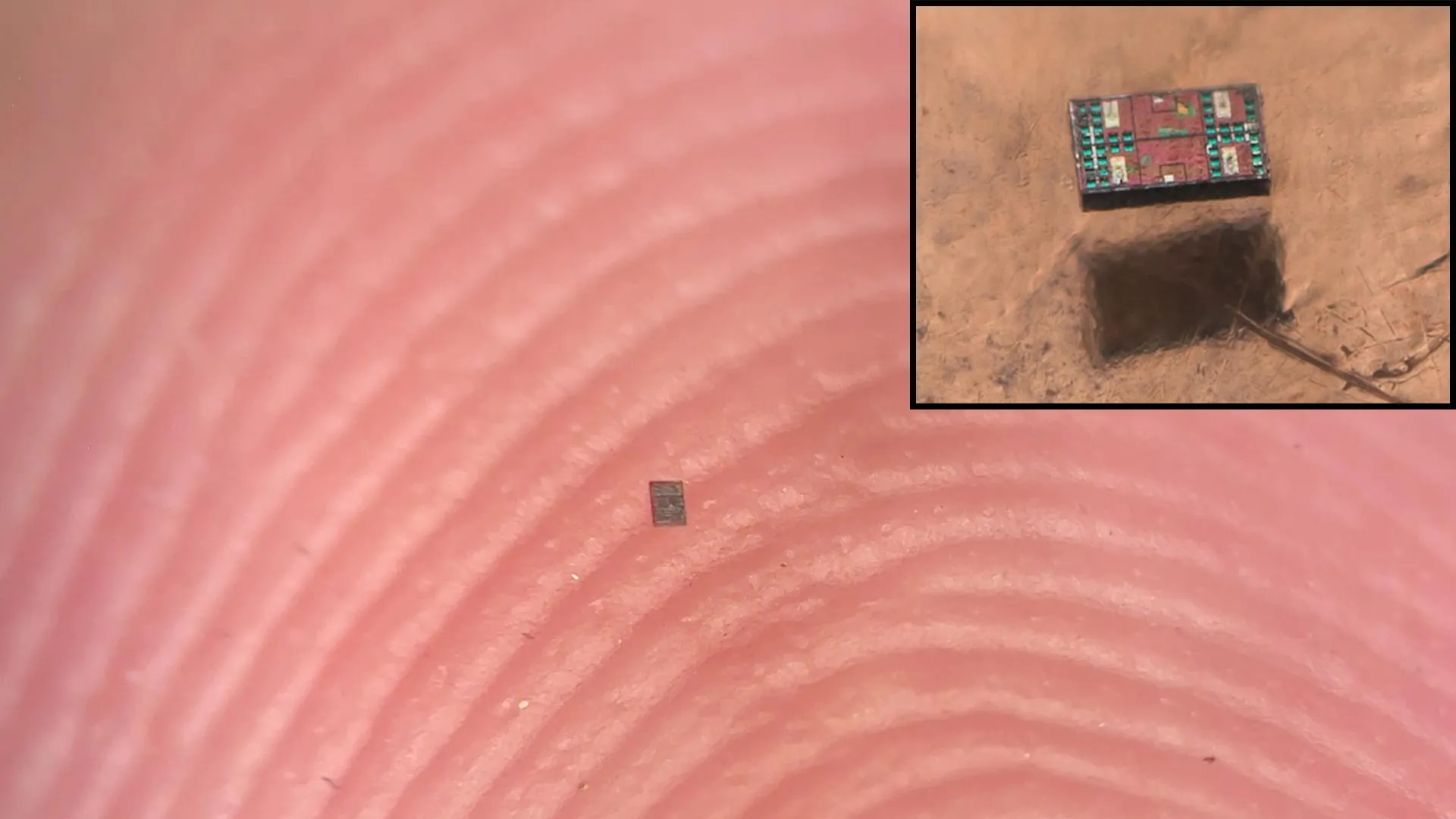
כל רובוט בקושי נראה ללא הגדלה, בגודל של בערך 200 על 300 על 50 מיקרומטר. זה הופך אותם לקטנים יותר מגרגר מלח. מכיוון שהם מתפקדים באותו קנה מידה כמו מיקרואורגניזמים חיים רבים, הרובוטים יוכלו יום אחד לעזור לרופאים לנטר תאים בודדים או לסייע למהנדסים בהרכבת מכשירים זעירים המשמשים בייצור מתקדם.
הרובוטים מונעים לחלוטין על ידי אור, מכילים מחשבים מיקרוסקופיים המאפשרים להם לעקוב אחר נתיבים מתוכנתים, לזהות שינויי טמפרטורה מקומיים ולהתאים את תנועתם בתגובה.
העבודה דווחה ב מדע רובוטיקה ו הליכים של האקדמיה הלאומית למדעים (PNAS). בניגוד למכונות זעירות קודמות, הרובוטים הללו אינם מסתמכים על חוטים, שדות מגנטיים או בקרה חיצונית. זה הופך אותם לרובוטים האוטונומיים והניתנים לתכנות באמת הראשונים בקנה מידה כה קטן.
"עשינו רובוטים אוטונומיים קטנים פי 10,000", אומר מארק מיסקין, פרופסור עוזר להנדסת חשמל ומערכות בפן הנדסה והמחבר הבכיר של העיתון. "זה פותח קנה מידה חדש לחלוטין לרובוטים הניתנים לתכנות."
מדוע כיווץ רובוטים היה כל כך קשה
האלקטרוניקה הפכה לקטנה בהתמדה בעשורים האחרונים, אבל הרובוטיקה לא הלכה באותו מסלול. לדברי מיסקין, עצמאות בגדלים מתחת למילימטר אחד נותרה אתגר בלתי פתור. "בניית רובוטים הפועלים באופן עצמאי בגדלים מתחת למילימטר אחד היא קשה להפליא", הוא אומר. "התחום בעצם תקוע בבעיה הזו כבר 40 שנה".
בסולמות יומיומיים, התנועה מעוצבת על ידי כוחות כמו כוח משיכה ואינרציה, התלויים בנפח של עצם. עם זאת, בגדלים מיקרוסקופיים, כוחות הקשורים פני השטח שולטים במקום זאת. גרור וצמיגות הופכים למכריעים, ומשנים באופן דרמטי את אופן פעולת התנועה. "אם אתה קטן מספיק, לדחוף מים זה כמו לדחוף דרך זפת", אומר מיסקין.
בגלל השינוי הזה בפיזיקה, תכנונים רובוטיים קונבנציונליים נכשלים. ידיים או רגליים קטנות נוטות להישבר בקלות וקשות מאוד לייצור. "רגליים וידיים זעירות מאוד קל לשבור", מסביר מיסקין. "גם מאוד קשה לבנות אותם".
כדי להתגבר על המגבלות הללו, החוקרים פיתחו דרך חדשה לחלוטין עבור רובוטים לנוע שעובדת עם הפיזיקה של העולם המיקרוסקופי במקום להילחם נגדה.
איך רובוטים מיקרוסקופיים שוחים
דגים ושחיינים גדולים אחרים נעים על ידי דחיפת מים לאחור, ומייצרים תנועה קדימה באמצעות החוק השלישי של ניוטון. הרובוטים הזעירים נוקטים בגישה שונה מאוד.
במקום להתכופף או להתכופף, הרובוטים מייצרים שדה חשמלי שדוחף בעדינות חלקיקים טעונים בנוזל שמסביב. כשהיונים הללו נעים, הם גוררים איתם מולקולות מים סמוכות, ולמעשה יוצרים תנועה בנוזל סביב הרובוט. "זה כאילו הרובוט נמצא בנהר נע", אומר מיסקין, "אבל הרובוט גם גורם לנהר לנוע".
על ידי התאמת השדה החשמלי הזה, הרובוטים יכולים לשנות כיוון, ללכת בשבילים מורכבים, ואפילו לתאם את תנועתם בקבוצות הדומות להקות דגים. הם יכולים להגיע למהירויות של עד אורך גוף אחד בשנייה.
מכיוון ששיטת שחייה זו משתמשת באלקטרודות ללא חלקים נעים, הרובוטים עמידים להפליא. לדברי מיסקין, ניתן להעביר אותם בין דגימות שוב ושוב עם מיקרופיפטה ללא נזק. מופעל על ידי אור מ-LED, הרובוטים מסוגלים להמשיך לשחות במשך חודשים.
אריזה של אינטליגנציה לגוף מיקרוסקופי
אוטונומיה אמיתית דורשת יותר מתנועה. רובוט חייב גם להיות מסוגל לחוש את הסביבה שלו, לקבל החלטות ולהפעיל את עצמו. כל הרכיבים האלה חייבים להתאים לשבב שרוחבו רק שבריר ממילימטר. האתגר הזה נלקח על ידי הצוות של דיוויד בלאו באוניברסיטת מישיגן.
המעבדה של Blaauw כבר מחזיקה בשיא ביצירת המחשב הקטן בעולם. כשבלאו ומיסקין נפגשו במצגת של סוכנות לפרויקטי מחקר מתקדמים בהגנה (DARPA) לפני חמש שנים, הם הבינו במהירות שהטכנולוגיות שלהם משלימות זו את זו. "ראינו שמערכת ההנעה של פן הנדסה והמחשבים האלקטרוניים הזעירים שלנו נוצרו רק אחד עבור השני", אומר בלאו. למרות זאת, הפיכת הרעיון הזה לרובוט עובד דרשה חמש שנים של פיתוח.
אחד המכשולים הגדולים ביותר היה כוח. "האתגר המרכזי של האלקטרוניקה", אומר בלאו, "הוא שהפאנלים הסולאריים זעירים ומפיקים רק 75 ננו-וואט של כוח. זה יותר מפי 100,000 פחות כוח ממה שצורך שעון חכם". כדי לגרום למערכת לעבוד, הצוות עיצב מעגלים מיוחדים הפועלים במתחים נמוכים במיוחד, וחותכים את צריכת החשמל ביותר מפי 1000.
החלל היה מגבלה מרכזית נוספת. הפאנלים הסולאריים תופסים את רוב פני הרובוט, ומשאירים מעט מאוד מקום לחומרת מחשוב. כדי לפתור זאת, החוקרים עיצבו מחדש את אופן פעולת התוכנה של הרובוט. "היינו צריכים לחשוב מחדש לחלוטין על הוראות תוכנית המחשב", מסביר בלאו, "עיבוי מה שבאופן קונבנציונלי ידרוש הוראות רבות לבקרת הנעה לתוך הוראה יחידה ומיוחדת כדי לכווץ את אורך התוכנית כדי להתאים למרחב הזיכרון הזעיר של הרובוט".
רובוטים שחשים ומתקשרים
יחד, ההתקדמות הללו הולידו את מה שלדעת החוקרים הוא הרובוט הראשון בתת-מילימטר המסוגל לקבל החלטות אמיתיות. למיטב ידיעתם, אף אחד לא הכניס בעבר מחשב שלם עם מעבד, זיכרון וחיישנים לתוך רובוט קטן כל כך. הישג זה מאפשר לרובוטים לחוש את סביבתם ולהגיב באופן עצמאי.
הרובוטים כוללים חיישני טמפרטורה אלקטרוניים שיכולים לזהות שינויים קטנים כמו שליש מעלה צלזיוס. יכולת זו מאפשרת להם לנוע לעבר אזורים חמים יותר או לדווח על ערכי טמפרטורה שיכולים לשמש כאינדיקטורים לפעילות סלולרית, מה שמציע דרך לנטר תאים בודדים.
העברת המדידות הללו דרשה פתרון המצאתי. "כדי לדווח על מדידות הטמפרטורה שלהם, תכננו הוראה מיוחדת למחשב המקודדת ערך, כמו הטמפרטורה הנמדדת, בהתנועעות של ריקוד קטן שהרובוט מבצע", אומר בלאו. "לאחר מכן אנחנו מסתכלים על הריקוד הזה דרך מיקרוסקופ עם מצלמה ומפענחים מהתנועות את מה שהרובוטים אומרים לנו. זה מאוד דומה לאופן שבו דבורי דבש מתקשרות זו עם זו".
אותו אור שמניע את הרובוטים משמש גם לתכנותם. לכל רובוט כתובת ייחודית, המאפשרת לחוקרים להעלות הוראות שונות ליחידות שונות. "זה פותח שורה של אפשרויות", מוסיף בלאו, "כאשר כל רובוט עשוי לבצע תפקיד אחר במשימה גדולה יותר ומשותפת".
פלטפורמה למכונות מיקרוסקופיות עתידיות
הרובוטים הנוכחיים הם רק נקודת ההתחלה. גרסאות עתידיות יכולות לשאת תוכניות מתקדמות יותר, לנוע מהר יותר, לכלול חיישנים נוספים או לתפקד בסביבות קשות יותר. החוקרים תכננו את המערכת כפלטפורמה גמישה, המשלבת שיטת הנעה חזקה עם אלקטרוניקה שניתן לייצר בזול ולהתאים לאורך זמן.
"זה באמת רק הפרק הראשון", אומר מיסקין. "הראינו שאתה יכול להכניס מוח, חיישן ומנוע למשהו כמעט קטן מכדי לראות, ושהוא ישרוד ויעבוד במשך חודשים. ברגע שיש לך את הבסיס הזה, אתה יכול לשכב על כל מיני אינטליגנציה ופונקציונליות. זה פותח את הדלת לעתיד חדש לגמרי עבור רובוטיקה במיקרוסקאל".
המחקר נערך בבית הספר להנדסה ומדע יישומי של אוניברסיטת פנסילבניה (פן), בית הספר לאמנויות ומדעים בפן ובמחלקת הנדסת חשמל ומדעי המחשב של אוניברסיטת מישיגן. המימון הגיע מהקרן הלאומית למדע (NSF 2221576), משרד הנשיא של אוניברסיטת פנסילבניה, משרד חיל האוויר למחקר מדעי (AFOSR FA9550-21-1-0313), משרד המחקר של הצבא (ARO YIP W911NF-17-S-0002), קרן Packard, הקרן הלאומית לננוטכנולוגיה של NSF ו-NSF Coordinated Infratechnology. (NNCI-2025608), התומך במרכז Singh לננוטכנולוגיה, יחד עם Fujitsu Semiconductors.
מחברים שותפים נוספים כוללים את Maya M. Lassiter, Kyle Skelil, Lucas C. Hanson, Scott Shrager, William H. Reinhardt, Tarunyaa Sivakumar, ו-Mark Yim מאוניברסיטת פנסילבניה, ודניס סילבסטר, Li Xu, וג'ונגו לי מאוניברסיטת מישיגן.
קישור לכתבת המקור – 2026-01-06 14:33:00



